7.2 On-Policy Function Approximation
Approximating state values is not sufficient to achieve control.
\[ \hat{V}(s; \mathbf{w}) \approx V_{\pi}(s) \]
What function should we focus on approximating in order to achieve control (approximate optimal policies \(\approx \pi_*\)) with continuous state information \(\mathbf{s}\)?
Consider the following OpenAI Gymnasium MountainCar environment (Moore 1990):
How can we summarize the Semi-Gradient SARSA update equation in 3 components?
\[ \mathbf{w}_{t+1} = \mathbf{w}_{t} + \underbrace{\alpha}\underbrace{(R_{t+1} + \gamma \hat{Q}(S_{t+1},A_{t+1}; \mathbf{w}_{t}) - \hat{Q}(S_{t},A_{t}; \mathbf{w}_{t}))}\underbrace{\nabla_{\mathbf{w}_{t}} \hat{Q}(S_{t},A_{t}; \mathbf{w}_{t})} \]
Baird’s Counterexample shows that even with linear function approximation, off-policy TD methods like Q-learning can diverge.
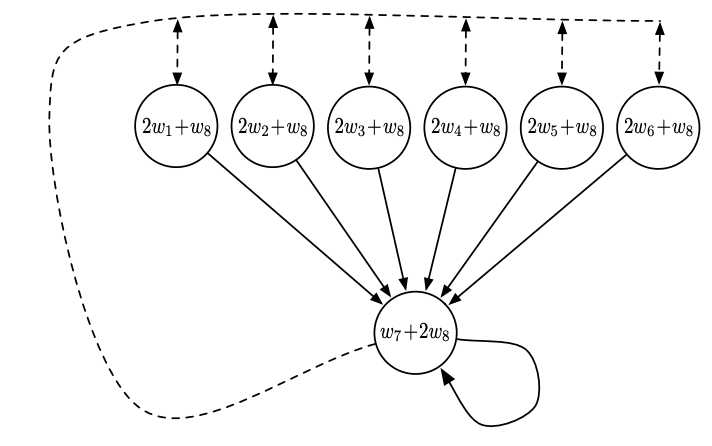
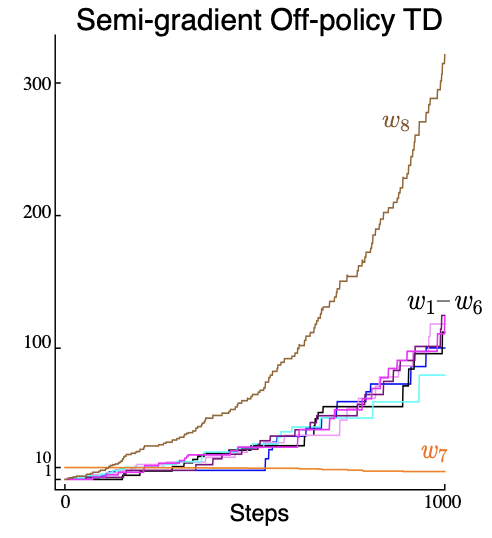
A real-world demonstration of this divergence: as training progresses, value estimates explode instead of converging.
Convergence of control algorithms:
| Algorithm | Tabular | Linear | Neural Networks |
|---|---|---|---|
| Monte-Carlo Control | ✅ | (✅) | ❌ |
| SARSA | ✅ | (✅) | ❌ |
| Q-learning | ✅ | ❌ | ❌ |